



EISCAT_3D description and status (January 2015)
February 2, 2015
A summary of the status of EISCAT Scientific Association and the EISCAT_3D ESFRI Preparatory Phase project was prepared in January 2015.
EISCAT_3D will be an international research infrastructure that is using radar observations and the incoherent scatter technique for studies of the atmosphere and near-Earth space environment above the Fenno-Scandinavian Arctic as well as for support of the solar system and radio astronomy sciences. The radar system is designed to investigate how the Earth’s atmosphere is coupled to space but it will also be suitable for a wide range of other scientific targets. It will be operated by EISCAT Scientific Association and hence be an integral part of an organisation that has successfully operated incoherent scatter radars for more than thirty years.
System configuration
February 2, 2015
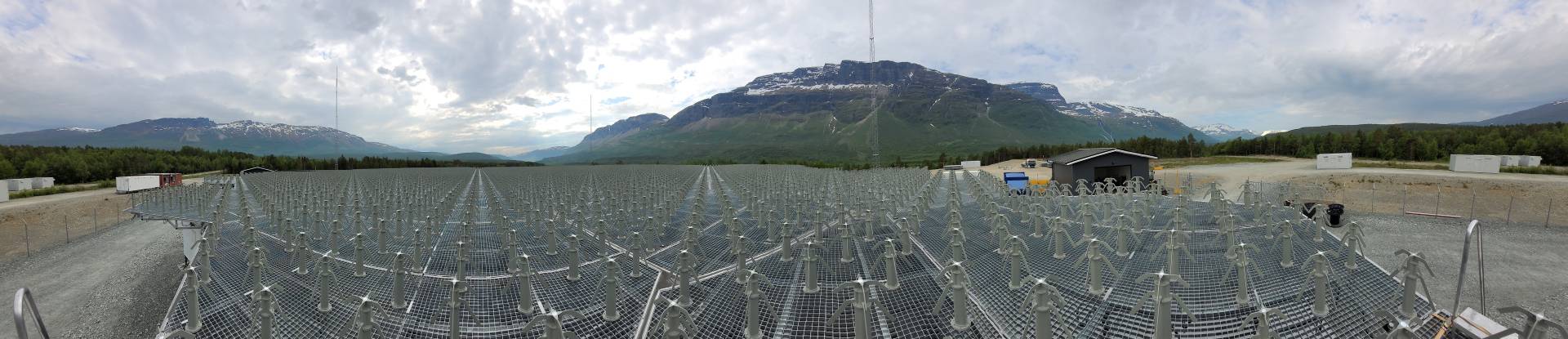
The EISCAT_3D system will consist of five phased-array antenna fields located in the northernmost areas of Finland, Norway and Sweden, each with around 10,000 crossed dipole antenna elements. One of these sites (the core site) will transmit radio waves at 233 MHz, and all five sites will have sensitive receivers to measure the returned radio signals. Digital control of the transmission and low-level digitisation of the received signal will permit instantaneous electronic steering of the transmitted beam and measurements using multiple simultaneous beams. The central antenna array at each site will be surrounded by smaller outlying arrays which will facilitate aperture synthesis imaging to acquire sub-beam transverse spatial resolution. The central array of each site will be of a size of about 70 m from side to side, and the sites will be located from 90 km to 250 km from the core site in order to be able to maximise the coverage by the system.
Scientific capability
February 2, 2015
EISCAT_3D will measure the spectra of radio-waves that are back-scattered from free electrons, whose motions are controlled by inherent ion-acoustic and electron plasma waves in the ionosphere. The measured spectra reveal high-resolution information on the ionospheric plasma parameters, but can also be used for obtaining atmospheric data and observations of meteors and space debris orbits. In both active and passive mode, the receivers will provide high-quality scientific and monitoring data from the ionosphere as well as from space within its designed frequency spectrum. The research will both be organised through common observation modes and through requests from individual groups.
EISCAT_3D is designed to use several different measurement techniques which, although they have individually been used elsewhere, have never been combined together in a single radar system. The design of EISCAT_3D allows large numbers of antennas to be combined together to make either a single radar beam, or a number of simultaneous beams, via beam-forming. While traditional radar systems with a single slow-moving antenna, and thus a single beam, can only show us what is happening along a single line in the upper atmosphere, volumetric imaging allows us to see geophysical events in their full spatial context, and to distinguish between processes which vary spatially and those which vary over time.
Since EISCAT_3D is very flexible compared to traditional ionospheric radars, it will allow several new operating modes, including the capabilities to determine vector velocities of moving objects and to respond intelligently to changing conditions, for instance by changing the parameters of a scanning experiment. EISCAT_3D will also allow remote continuous operations, limited only by power consumption and data storage. This is important for monitoring the state of the atmosphere, especially as a function of solar variability, as well as capturing events that appear suddenly and are hard to predict. Radio astronomy observations will be performed when the transmitters are inactive.
Main results from the FP7 Preparatory Phase
February 2, 2015
The EISCAT_3D Preparatory Phase was concerned with forming a consortium, procuring the financing, selecting the sites, preparing for the data handling, considering the scientific requirements and planning the construction and operation of the system.
The present EISCAT Scientific Association, which will be the basis for the future EISCAT_3D consortium, is funded by research councils and funding bodies in six countries. EISCAT revised its membership policy in May 2013 in order to make it more attractive to new members, and is now open also for institutional members with a smaller financial commitment. Procedures are also implemented within the research infrastructure to safeguard good scientific practice and to ensure the commitment to excellent research. EISCAT has made progress in the work to revise its data policy to prepare for the new system.
To procure the finances, major investments will be needed from several countries. The current estimate of the investment required for EISCAT_3D is 128 M€ over 8 years. This estimate is based on figures given by individual manufacturers, and reductions may still be possible on individual parts, depending on the exact specification as well as bidding from several competitors. Proposals for funding EISCAT_3D have been submitted in Norway and Sweden, and the process is well under way in Finland, Japan and the United Kingdom.
A number of sites for the EISCAT_3D arrays were surveyed, and a list of preferred sites was finalised. In the first stage of the construction of the EISCAT_3D system, the core site and two receiver sites will be built. Areas near Bergfors in Sweden and Karesuvanto in Finland were identified as suitable for the first receiver sites. For the later stages of the construction, areas near Andøya (Norway) and Jokkmokk (Sweden) were identified as locations for receiver sites.
The scientific requirements have a major influence on the system design and for this a Science Case has been continuously revised in collaboration with the present EISCAT user community and with prospective future users. Communication with the scientific user community was facilitated through outreach activities, conference presentations and a series of dedicated meetings organised by the project. The website for EISCAT_3D is online since March 2009 and is regularly maintained and updated.
The planning of the construction and operation of the new system requires a detailed instrument design. The project made use of innovative theoretical studies in signal processing, radar coding, data handling and data analysis, that was summarised in a handbook of measurement principles. The EISCAT_3D will carry out signal processing using software-defined radio receiver systems. The design of the hardware elements needed for the final system and the work on the technical integration of these subsystems were the focus of several of the Work Packages in the project.
A radar system of the complexity of EISCAT_3D requires specialised software both for the system control and for the signal processing and beam-forming. The EISCAT system control software EROS was updated to be able to be used in the context of EISCAT_3D. A parallelised tool for signal processing and data analysis, RLIPS, to be used in the EISCAT_3D radar system was developed, and signal processing and beam-forming software were prepared and tested.
Some of the e-infrastructure needs of EISCAT_3D, such as the network connections between the sites and the computing and data storage near the instruments, require local solutions. Hence a plan was developed with e-infrastructure providers in the host countries for their future involvement in the planning.
Future collaborations
February 2, 2015
The overall theme of EISCAT_3D is to explore the multiple facets of the question how the Earth’s atmosphere is coupled to space. The EISCAT_3D science encompasses climate change, space weather, space debris and near-Earth object studies. The technical challenges to handle large data volumes will employ tools from the newly emerging field of e-science and spur collaboration with local computing centres. EISCAT_3D will provide an unprecedented resource for observations of the near-Earth space. It will provide long-term time-series data of the ionospheric conditions enabling studies of variations on a time-scale over several solar cycles.
When in operation, EISCAT_3D will be at a central position in the international, and trans-regional, space cluster of Northernmost Scandinavia, which includes large space research centres in Kiruna (Sweden), Sodankylä (Finland) and Tromsø (Norway), two rocket launch facilities in Andøya (Norway) and Esrange (Sweden), and several other instruments and instrument networks for geospace observation such as magnetometers and auroral cameras.
The scientific data from EISCAT_3D will be an invaluable asset for models and near real-time forecasts of space weather effects on modern technology, including power grids and other important infrastructures. EISCAT_3D can also contribute to the Space Situational Awareness (SSA) programme by tracking known space debris and assisting communication and navigation services like the Galileo navigation satellites. Discussions have just been initiated between EISCAT, agencies and institutes in the Nordic countries and the European Space Agency (ESA) on the prospect of including EISCAT_3D in ESA’s SSA programme. EISCAT will continue to be an active participant in global observation campaigns and international and European research projects. From its foundation EISCAT has been a purely scientific organisation. The radar technologies to be used with EISCAT_3D allow the detection and tracking of small objects in space. The new Bluebook has stipulations that ensures that the EISCAT facilities will be used strictly for scientific and civilian purposes.
Steps towards construction
February 2, 2015
The construction of EISCAT_3D requires close interaction with industry in order to ensure the production of components of the high quality and the large numbers needed. This includes the manufacturing of the antenna elements and the corresponding electronics. Engineering solutions could be a development driver for large scale distributed systems in harsh environments.
EISCAT and its users are working together with industry to develop technology and applications for EISCAT_3D. Enterprises, both regional and national, within the EISCAT member countries are expected to respond to invitations to tender for e.g. radio and the digital signal processing instruments, antenna front end and timing systems, and other advanced subsystems.
The timing of EISCAT_3D is ideal. It is now feasible to construct and operate the system and to handle the data volume that the system will provide; this was not the case a few years ago. An increasingly technology-dependent society needs to understand the ionospheric processes caused by space weather in order to minimise their effects on sensitive systems. EISCAT_3D will offer state-of-the-art instruments to the scientific community for dedicated observation campaigns to study processes important for the understanding of our environment and climate, such as the energy coupling between the upper and lower atmosphere, the linkages between the different layers of the upper atmosphere and to interplanetary space, small-scale structures and phenomena as well as micro-meteoroids that enter the atmosphere and participate in atmospheric processes.
EISCAT_3D Preparatory Phase: Report on the final project status
February 2, 2015
Note: This report (EISCAT_3D Preparatory Phase: Report on the final project status) was prepared in October 2014
The aim of the project was to ensure that the EISCAT_3D project will reach a sufficient level of maturity with respect to technical, legal and financial issues so that the construction of the EISCAT_3D radar system can begin immediately after the conclusion of the project. During the EISCAT_3D Preparatory Phase Project the baseline design and site configuration of the full EISCAT_3D system was developed based on reaching a broad consensus in the EISCAT user community.
National consortia in 5 countries have prepared their funding applications in-line with the prepared overall project plan for EISCAT_3D and with their specific research programmes. The costs for the full EISCAT_3D system were clarified during the preparatory phase project and a 4-stage plan to build EISCAT_3D was developed. Stage 1 will already provide world-leading measurements capabilities to attract new users and expand the membership. The presently identified funding opportunities are expected to cover stage 1 and possibly stage 2.
A revised version of the EISCAT Statutes (Blue Book) that can serve as the consortium agreement for EISCAT_3D has been prepared and at present is subject to consultations. The technical work carried out by the project partners is finalized and results are handed over to EISCAT for future use during the implementation phase that will be carried out with industry. The user meetings that were initially organized within the Science activities of the project will continue and will be organized by the EISCAT user community. The budgets prepared within the Preparatory Phase Project will be updated within EISCAT HQ and presented to the Research Councils for negotiations. Some opportunities for additional funding from affiliate members and other sources are identified.
Project overview
February 2, 2015
Project period
1. October 2010 – 30. September 2014
Project funds from EC
4 495 227.62 €
Spend by 30 June 2014
3 924 697.63 € (87.31%)
This report describes the outcome of the project as it can be evaluated in October 2014 with the caveat that the reporting is not finalized yet. A major project revision took place in the beginning of 2013 and was reported to Council previously. At that time the descriptions of the work packages were revised and funding allocations modified. All project deliverables have been submitted to EC by 30. September 2014. The EISCAT_3D_2 periodic report 3 for the period October 2013 – September 2014 and the EISCAT_3D_2 final report still need to be prepared within 60/90 days after the end of the project. Based on the numbers as of 30. June 2014 all but one partner were with their spending within their budget limits.
Project partners: The participants are University of Oulu (UOULU), Luleå University of Technology (LTU), Swedish Institute of Space Physics (IRF), University of Tromsø ( UiT), Science and Technology Facilities Council in the United Kingdom (STFC), the Swedish Research Council (VR), National Instruments (NI) and EISCAT Scientific Association (EISCAT) as the project coordinator. Because of a modification of the SNIC organizational structure, Uppsala University (UU) joint the project as a partner in 2013 in its role as host of the Swedish National Infrastructure for Computing (SNIC). SNIC worked together with Umeå University as a third party of UU.
Work of project committees
February 2, 2015
EISCAT_3D General Assembly (GA): GA is the ultimate decision-making body of the EISCAT_3D Preparatory Phase consortium. It consists of one representative from each of the participating entities and two representatives from the Coordinator (EISCAT). Members are:
- Esa Turunen (EISCAT Scientific Association) (until 12/2012)
- Craig Heinselman (EISCAT Scientific Association) (since 01/2013
- Henrik Andersson (EISCAT Scientific Association)
- Cesar La Hoz (Universitetet i Tromsø)
- Jerker Delsing (Luleå Tekniska Universitet)
- Lars Eliasson (Institutet för Rymdfysik)
- Anita Aikio (Oulun Yliopisto)
- Tomas Andersson, (Vetenskapsrådet)
- Leif Johansson (National Instruments)
- Richard Harrison (Science & Techn. Facil. Council Rutherford Appleton Lab.)
- Jacko Koster (Swedish National Infrastructure for Computing, SNIC) since 2013
The EISCAT_3D_2 General Assembly had 8 meetings during the project.
EISCAT_3D Executive Board: The Executive Board acts as the supervisory body for the execution of the EISCAT_3D Preparatory Phase. The Executive Board prepares meetings, proposes decisions and prepares the agenda of the General Assembly. It seeks a consensus among the members of the consortium, is responsible for the proper execution and implementation of the decisions of the General Assembly and it monitors the effective and efficient implementation of EISCAT_3D Preparatory Phase project. The members of the EISCAT_3D Executive Board are:
- Esa Turunen (EISCAT Scientific Association) (until 12/2012)
- Craig Heinselman (EISCAT Scientific Association) (since 01/2013)
- Henrik Andersson (EISCAT Scientific Association)
- Jonny Johansson (Luleå Tekniska Universitet)
- Unni Pia Løvhaug (Universitetet i Tromsø) (since 01/2013)
- Ingrid Mann (EISCAT Scientific Association) (since 01/2013)
- Ian McCrea (STFC, Rutherford Appleton Laboratory)
- Thomas Ulich (Oulun Yliopisto/Sodankylän Geofysiikan Observatorio)
Initially the EISCAT_3D Executive Board had teleconferences every week and physical meetings every 3 months. Since beginning of 2013 the teleconference were normally scheduled every second week and only more often, if needed, and some of the discussions were moved to more targeted technical meetings.
The Technical Advisory Committee (TAC) is the monitoring body for the technical execution of the EISCAT_3D Preparatory Phase. It consists of a Technical Coordinator, appointed by the Coordinator, and up to four other members. TAC receives and reviews reports from each work package leader describing the technical progress of his/her work package and the upcoming plans. It reviews and assesses the levels of existing and planned technical coordination between the various work packages of the project as well as the levels of existing and planned technical coordination between the various project partners, including their sub-contractors and affiliated entities. It also provides regular feedback to each work package leader, assessing the progress of each work package, the interactions between the work packages and the project participants, and makes recommendations for future actions. The members of the Technical Advisory Committee are:
- Jan-Geralt Bij de Vaate (Netherlands Institute for Radio Astronomy (ASTRON), Dwingeloo, The Netherlands)
- Tom Grydeland (Northern Research Institute (NORUT), Tromsø, Norway)
- Frank Lind (MIT Haystack Observatory, United States, Technical Coordinator and Chairman of TAC)
- Werner Singer (Leibniz-Institute of Atmospheric Physics (IAP), Kühlungsborn, Germany)
The Technical Advisory Committee has held one regular meeting in 2011, but this proved to be the only meeting of this kind. While the TAC chair provided many useful insights and suggestions, a tighter definition of his role might have made the TAC a more effective review body. The project suggests EISCAT take some measures to set up a technical review during the coming few months.
Project meetings
February 2, 2015
A number of internal project meetings and technical meetings took place during the duration of the project, notably the “All Hands” meetings of 2011 and 2012 and “end of the project meeting all-hands meeting” on 11 -12 September 2014. A “Small Hands” meeting was organized in 2013, which was restricted to discussing the technical work packages only. The meeting was open for all project participants and also EISCAT staff from all sites participated. The EISCAT director and the EISCAT staff also convened several “technical telecons” to speed up progress and improve coordination among the technical work packages. They proved to be very valuable, though in retrospect they should have started earlier and have been made on a more regular basis. The project also held two public presentations.
A public presentation of the EISCAT_3D project took place at the start of the preparatory phase and another one took place on 12 September 2014 at Rymdcampus in Kiruna. The agenda included the following presentations:
- EISCAT_3D: the next generation incoherent scatter radar for scientific research (Craig Heinselman, EISCAT)
- EISCAT_3D: Arctic Research Infrastructure for Geospace Environment and Atmosphere (Esa Turunen, SGO)
- EISCAT_3D: the view from Swedish Institute of Space Physics (Lars Eliasson, IRF)
- EISCAT_3D in Norway (Cesar La Hoz, UiT)
- EISCAT_3D and the e-infrastructure challenges (Jacko Koster, SNIC)
The EISCAT_3D users meetings have been held every May in Uppsala, concentrating on different science issues. They have been highly successful and provided a focus for the prospective user community to receive information on the project and contribute their ideas. There is an agreement within the user community to continue these annual meetings after the end of the Preparatory Phase Project.
Overview of project work packages
February 2, 2015
Short overviews of the work packages are listed here.
February 2, 2015
Lead: EISCAT
EISCAT 16.9 months, UOULU 0.8 months, LTU 0.8 months, IRF 0.8 months, UiT 0.8 months, STFC 9 months, VR 0.8 months, NI 0.8 months, UU 0.6 months
The management work package runs throughout the Preparatory Phase, ensuring a smooth and efficient approach towards the objectives of the EISCAT_3D project, with respect to both financial management and general project administration.
WP1 has proceeded smoothly with no major problems. The meetings have usually been efficiently organised and overall the project is in good financial shape.
WP2: Legal and logistical issues
February 2, 2015
Lead: EISCAT
EISCAT 10.5 months, UiT 6 months
This work package contains all the support activities needed to clarify the site selection and infrastructure issues needed for the construction and operation of EISCAT_3D. These are required activities are: Finalising the site selection, and identifying all the relevant stakeholders and administrative issues, which have to be addressed in order to allow construction to start at the selected sites. Identifying the necessary steps to provide access to relevant infrastructure (power, utilities, networking, transport) at the selected sites. Quantifying the full costs of each site development.
WP 2 activities started at the beginning of the project and continued until July 2014. Site surveys were performed at several possible EISCAT_3D sites already during the FP6 Design Study and these were revisited and some new sites surveyed. The list of potential sites was finalised during the summer of 2013. An area near Skibotn in Norway has been found as a suitable location for the core site from scientific point of view. An area near Bergfors in Sweden has been identified as suitable for the first receiver site. Radio Frequency Interference (RFI) measurements have been conducted in Skibotn and Bergfors during the summer of 2013. For the later stages of the construction, areas near Inari (Finland), Jokkmokk (Sweden) and Andøya (Norway) were initially identified as locations for receiver sites.
The Norwegian and Swedish proposal efforts have received some feedback to define several budget levels and implementation levels of the EISCAT_3D system and in response to that the project has prepared a plan for stage-wise implementation of EISCAT_3D with each stage having advanced system capabilities that are unique on an international level. Stage 1 will consist of sites in Skibotn, Bergfors, and Karesuvanto. The later stages include sites in Andøya and Jokknokk. While Karesuvanto was already considered as a possibility during the project, now closer site surveys were started there. The discussions with the local stakeholders at Skibotn and Bergfors have started regarding topics such as land rights, terms, conditions and environmental impacts. These discussions also include access to infrastructure such as roads, power and data networks. Tromsø University participated in the site discussion and established local contacts through a consultancy. The real negotiations cannot truly begin before there are firm decision on the site locations.
WP2 has undergone some changes in mid-project, with a revision of the scope to take out the site selection tasks, since it has been established that the sites could not be finally acquired until funding is assured and this decision would be made by Council, and not by the project. Also the frequency negotiations were removed from the project because of the uncertainties in the time line and because of their connection to decisions that are beyond the project. With these changes, the work package has gone smoothly.
WP3: Science planning and user engagement
February 2, 2015
Lead: UOULU
UOULU 16 months, STFC 11 months, EISCAT 2 months
This work package covers all those activities needed to engage with the new users whose activities will come within the scope of the enhanced facility. More than simply contacting new users, a key activity will be gathering their requirements for the science topics that they will address, and the different types of new experiment which they would like to run. Work package 3 started at the beginning of the project and continued until July 2014.
The WP organized a number of meetings with Science Working Groups on specific topics and user engagement workshops and participated in the organization of the EISCAT_3D User meetings that the project organized every year. A meeting together with representatives for the technical Work packages in the project in early 2013 resulted in a detailed list of requirements on the radar system from the scientific point of view. In addition to the different research areas addressed with EISCAT_3D the meetings also were devoted to discussion with the space weather and modeling communities and to discussions on using EISCAT_3D in combination with other instruments.
The WP3 has been a demanding project because it needed to cover all potential uses of the new radar. The outcome is a voluminous science case document and a number of contacts with new user groups. The work package has gone smoothly.
WP4: Outreach activities
February 2, 2015
Lead: EISCAT
EISCAT 24 months
In order for EISCAT_3D to be successful, it is imperative that the project should establish and maintain a strong outreach activity, addressing the provision of publicity information to the general public, opinion-formers, and particularly aiming at the students and young people who will form the next generation of EISCAT users.
WP4 has probably originally been underestimated in terms of the work required. The outreach to opinion formers and decision makers turned out to be more important than originally thought and especially more time-consuming. Nonetheless, this work package has been generally successful and has gone smoothly.
WP5: Consortium building
February 2, 2015
Lead: EISCAT
EISCAT 21 months, UiT 6 months, VR 4 months
In this work package, the consortium of funding bodies which will support the new infrastructure is identified, a firm overview of the costs of constructing and operating the new infrastructure is obtained and confronted to the commitments available, and the organisational structure of EISCAT is re-examined, in order to verify whether the new consortium can be accommodated.
WP5 was successful in identifying some potential new partners and especially in co-ordinating the existing partners into a consortium to fund the project. Five countries are now preparing coordinated funding proposals and their national applications are at various stages in the review process. The work package also established the path of dialogues with e-infrastructure stakeholders and with other European research infrastructures. The effort needed to support national funding applications in the membership countries was underestimated by far and the activities were partly funded outside of the project.
WP6: Performance specification
February 2, 2015
Lead: EISCAT
EISCAT 4 months, UOULU 28 months, STFC 2 months
The preparation of an initial performance specification was already undertaken at the start of the FP6-funded EISCAT_3D Design Study. This is revisited and during this phase of the project, the trade-off between the desired system performance and the level of resources likely to be available to implement EISCAT_3D will become evident. EISCAT_3D will also incorporate a range of new measurement principles made possible not only by the innovative phased array design, but also by the innovative types of signal processing, coding, data handling and data analysis. A handbook of measurement principles is prepared, in order to outline the optimum strategies for the use of the new facility.
WP6 has posed some difficulties in coordination, since the package was shared between two different partners and the lead partner (EISCAT) did not have most of the staff months, which were dedicated to preparing the “Handbook of Measurement Principles”. There have been quite lengthy initial discussions about this work package and some issues took a long while to resolve. A first version of the Integrated Performance Specification was prepared by EISCAT HQ on the initiative of the project manager already in April 2012. This was also basis for the first funding applications and it was approved by the Executive Board in November 2013. The discussions of the performance specification were made under broad and active participation of the user community.
WP7: Digital signal processing
February 2, 2015
Lead: UOULU
UOULO 22.3 months, NI 10 months
In this work package, the techniques of signal processing using software-defined radio (SDR) receiver systems is developed to be suitable for parallel processing of signals from a phased array radar. The development is done via laboratory set-ups of hardware and software, followed by a field trial of the developed units, to establish their reliability and performance.
WP7 has suffered from organisational and intellectual property problems and delays in the planned field testing. They were only carried out during the last months of the project. Part of the delay is caused by revisiting some fundamental design issues (such as the concept of a locally bistatic system) which, in hindsight, proved to be unnecessary.
WP8: Antenna, front end and time synchronization
February 2, 2015
Lead: LTU
LTU 48 months, NI 2 months
The antennas, array layout, receiver front end, and calibration system all play important roles in setting the achievable system performance. The objective of this work package is to produce designs of these hardware elements which will be suitable for industrial consideration, and to identify the people who are capable of constructing them.
WP8 outcome is in good shape, with a good design and working prototypes being tested. The work that involved SMEs and resulted in prototyping carried out in WP14.
WP9: Transmitter development
February 2, 2015
Lead: IRF
IRF 30 months, EISCAT 4 months
In this work package, important parts of the EISCAT_3D radar transmitter subsystem are designed and evaluated. These particular areas of the transmitter design were planned to be addressed already during the FP6 Design Study were left unfinished because of a lack of manpower and time.
WP9 was intended to be a limited activity, following up on work done in the FP6 design study. The work has been finalized more than a year ago.
WP10: Aperture synthesis imaging radar
February 2, 2015
Lead: UiT
UiT 24 months
The major activity of this work package is the determination of the optimum number of outlying passive phased array antennas and their optimum localisation (antenna configuration) in order to fulfill the imaging (across-beam) spatial resolution criteria of the Aperture Synthesis Imaging.
WP10 was also a follow-on activity from the FP6 study and has been successfully finalized several months before the end of the project.
WP11: Software theory and implementation
February 2, 2015
Lead: UOULO
UOULO 45 months
The purpose of this work package is to develop the software modules required for data processing and analysis tasks of the EISCAT_3D radar system. The development is needed because of the complexity of a distributed phased-array incoherent radar system compared to earlier systems.
WP11 has made lots of progress in developing solutions for this tasks but it could have gone even further in integration of EISCAT_3D hardware and software, if there had been faster progress in the other work packages (especially WP 7). Nonetheless, this work package has been generally successful and has gone smoothly.
WP12: System control
February 2, 2015
Lead: EISCAT
EISCAT 8 months
This work package determines the changes that are needed to be implemented in the existing EISCAT system control software (EROS) in order to control a system on the scale envisaged for EISCAT_3D with sufficient flexibility and programmability.
The work plan for this work package has been significantly changed compared to the original work plan, since the development of an operating system for a specific hardware cannot be made within the scope of the Preparatory Phase project. Instead the focus is turned towards general considerations needed for a system of the scale of EISCAT_3D. This work also suffered from delays in other work packages and some of the work originally planned turned out to be impossible because other packages were not far enough along. Nonetheless, this work package has been generally successful and has gone smoothly.
WP13: Data handling and distribution
February 2, 2015
Lead: UU
UU 6 months
This work package determines how the EISCAT_3D data system will be implemented on the e-infrastructure which currently exists in northern Scandinavia or is planned for the near future. Carried out by Uppsala University (UU), hosting the Swedish National Infrastructure for Computing (SNIC) together with Umeå University, third party of UU, engages with the national providers of networking, storage and high performance computing to ensure that the requirements of the project can be optimally satisfied. According to the modified plan, the activities in this work package started in March 2013 and continued until the end of the project.
WP13 was in the beginning hampered by the uncertainties in the performance specification and in addition experienced some delays, because the legal entity responsible for the Swedish National Infrastructure for computing changed from VR to Uppsala University as host of SNIC during the project. Through SNIC becoming more involved it was possible to make some very useful additional connections to e-infrastructure providers in the host countries. The work package has been de-scoped to six months and this time has been well spent.
WP14: Technical integration and production issues
February 2, 2015
Lead: EISCAT
EISCAT 24 months, LTU 10 months, NI 6 months
This work package focuses on technical integration between the various sub-systems and the overall manufacturing, reliability and quality assurance. The work package starts halfway through the project when the RTD oriented work packages are well underway. Several sub-parts are deemed to be fairly standardised and are intended to be used integrated in the final system together with the unique parts that will be developed primarily in work packages 7, 8 and 9. The technical integration will identify and incorporates all parts of the whole system into a producible system. This activity is also vital for the costing of the whole system.
WP14 has always been planned to start only in the second half of the project, because it bases on outputs from the other technical packages. It suffered from lack of progress in the other technical work packages and from the lack of technical coordination in the project. It has been impossible to do all of the prototyping originally planned, but the prototyping that was done, was quite successful. The deliverables were adjusted to prepare for the costbook preparation requested by the research councils. The deliverables of this work package contain specification of the required sub-systems (without cost information) as well as all information relevant to preparing the cost book except for the numbers that have to be confidential. With the technical description document and the basic parameters for the costbook the deliverables contain the technical documents that are among the most urgently needed documents for the next steps toward implementing EISCAT_3D. All deliverables in this work package are in good shape.
Potential new affiliate members and funding opportunities
February 2, 2015
Discussions with the present and potential future partners have resulted in a number of groups that are interested joining the project in the near future. EISCAT has in June 2013 published a new Membership Policy anticipating a new affiliate membership that will be included in the new statutes of the association. While EISCAT will continue its time-buying scheme to allow research groups and organisations to get access to its facilities given that the external users can cover the operational costs for doing the experiments; the focus will not be on selling observation time to pay for operations but rather to expand the numbers of Associates and Affiliates. Recently the Institute de Recherche en Astrophysique et Planétologie (IRAP-CNRS, France) already signed up as affiliate. The Russian Arctic and Antarctic Research Institute and the Institute of Radio Astronomy of the National Academy of Sciences of Ukraine are planning to change funding from time-buying schemes to Affiliate memberships. Discussions with potential new members converged to a group of institutions in several countries that are interested in joining as affiliate members in the near future, some in 2015. The present situation is as follows:
- The Belgium Institute for Space Aeronomy is interested in aurora studies, meteor studies and joint spacecraft observations with EISCAT, their affiliate membership had to be postponed because of a budget cut. But membership paid through project funding would be considered.
- The German Aerospace Center is interested in space weather research and middle and upper atmospheric studies with EISCAT and considers becoming an Affiliate Member.
- The Leibniz-Institute for Atmospheric Research is interested in middle atmosphere observations, partly in combination with rocket campaigns and in coordination with their instruments located near Andoya. Opportunities for funding an Affiliate Membership are at present explored.
- The CNRS institute has made an agreement with EISCAT already (see above) and intends to continue that, as funding permits.
- INGV in Rome is interested in collaborations related to space weather research, some initial discussion took place, but conditions are still unclear.
- The Korea Polar Research Institute (KOPRI) indicated its interest in using EISCAT for research into the arctic atmosphere and becoming Affiliate member in 2015. An initial discussion with the EISCAT community took place during the EISCAT SOC meeting in August 2014.
- The Korea Astronomy and Space Science Institute is interested in becoming Affiliate member in 2015 in order to use EISCAT for space weather studies. An initial discussion with the EISCAT community took place during the EISCAT SOC meeting in August 2014.
- The Polish Space Research Institute in Warsaw suggested to start the Affiliate membership through a joint scientific research proposal which will be prepared by the end of 2014.
- Finally EISCAT was asked to participate in an effort to establish a distributed research infrastructure on space weather in Europe.
The European Space Agency (ESA) has before bought observation time and supported special projects at EISCAT. There is a mutual interest in continuing the cooperation, especially focused around the European H2020 Space programme and ESA’s programme on Space Situational Awareness (SSA). The conditions of space debris observations are still subject to discussions and Council decided an expert group should work out and suggest to Council the details of how EISCAT could participate in space debris observations.
European Commission: The message from EC and the Competitive Council is that EISCAT_3D is targeted for funding in the range of 2-5 MEUR in the upcoming INFRADEV-3 call for supporting the transition toward implementation. The call is scheduled to close on January 14th 2015.
Engagement with local stakeholders
February 2, 2015
Some discussions with local stakeholders started during the Preparatory Phase project and need to be continued during the implementation of EISCAT_3D.
Discussions with host institutions
The project receives active support from the EISCAT host institutions who ate present provide part or all of the staffing and operation of the sites. They also have played key roles in submitting funding proposals for EISCAT_3D in their countries. Discussions with the host institutions take place about twice a year and all participants agreed to continue doing so during the implementation of EISCAT_3D.
Discussions on e-infrastructure providers in the host countries
During the transition of EISCAT_3D from the preparatory phase to the implementation phase several important tasks are related to e-infrastructure close to the sites. Aside from that archiving solutions need to be developed and the large volume of data suggests archiving close to the sites, which makes it plausible to link to existing e-infrastructure in the Nordic countries. Within the preparatory phase project WP 13 partner SNIC has taken over the role to engage with stakeholders from national e-Infrastructure provider organizations and academic high-performance computing centres. The SNIC computing centres are, however, also a potential host of the future EISCAT_3D archive. To avoid conflicts of interest during the negotiation phase it is desirable to have an independent party involved. The project has asked for support from the Nordic e-Infrastructure Collaboration (NeIC). EISCAT together with NeIC has identified a project plan to collaborate on preparing to meet the e-infrastructure and e-science needs of EISCAT_3D. The envisioned project would assign to NeIC a moderator role in the discussion with the different stakeholders in the Nordic countries, discussion outcomes would be reported to EISCAT Council. In September 2014, the support project was proposed to the NeIC Board where the research councils and academic computing centers of the Nordic countries are represented.
Discussions on frequency allocation
This dialogue was carried out outside of the Preparatory Phase Project and still continues. There were some positive developments, but frequency allocations are not granted yet. In a next step more detailed information is prepared by EISCAT and delivered to the authorities.
Considering management structure for EISCAT_3D – next steps
February 2, 2015
Based on the statutes EISCAT_3D will be implemented by EISCAT Scientific Association who is the project owner and assumes overall responsibility. EISCAT Council oversees the implementation and delegates its execution to the EISCAT director who is supported by a project office that is installed for this purpose. It is suggested that the director and the project office will also regularly consult with the representatives of national consortia, with the host institutions and the EISCAT_3D user meeting during their work, while all project decisions and negotiations among the different national consortia are done in Council where all consortia are represented. It is foreseen that Council’s AFC will closely monitor the finances and administrative work of the project office. The project proposes to Council to install in addition a Technical Review Panel (TRP) with the mandate to review the instrument design work and to evaluate whether the design is suitable to meet the measurement, budget and operational requirements at the same time.
Signing the revised EISCAT Statutes (the new Bluebook) is also important because some of the modifications and additional documents respond to comments that the project received during different presentations and evaluations: the need for a de-commissioning plan, for a data policy, for specifying e-infrastructure needs and developing solutions and for having well-defined performance indicators and a structure for planning and reporting within the association in place. The new Terms of Reference in the Bluebook suggest that workflow within the association will be more structured so that coherent workflow related to strategic and operational planning and reporting shall equip the Council to make informed decisions. In order for this to have some credibility, it would be helpful that the already existing reporting within the association be updated regularly. A clear reporting and smoothly working committee structure would also be helpful for attracting new members. To clarify the conditions for space debris observations it would be helpful the planned expert group starts its work soon after the Council meeting.
Both the expert group and the Technical Review Panel would need a well-defined task given to them by Council. Also the funding needs to be clarified and chairpersons need to be assigned.
Attachments
Documents related to WP6 can be found in our external library.